
Genesis AI Unveils Genesis World 1.0: A Leap Forward in Robotics Foundation Model Evaluation
Genesis AI has launched Genesis World 1.0, a platform designed to revolutionize robotics foundation model development.
This platform integrates a physics engine, a real-time path-traced renderer (Nyx), a Python-to-GPU compiler (Quadrants), and a streamlined simulation interface. All components work together to accelerate the evaluation of robotics models through simulation.
The primary challenge in robotics model development? Overcoming data acquisition and iteration speed bottlenecks.
Genesis AI emphasizes the efficiency with which teams can evaluate candidate policies and compare model checkpoints as a critical factor in model development.
Addressing the Bottleneck: Faster Robotics Model Evaluation in Genesis World
Genesis AI highlights the time-intensive nature of traditional policy evaluation, where a typical evaluation might involve hundreds of tasks, each with numerous episodes.
Executing this in the real world demands over 200 hours of continuous robot operation, requiring a human operator and a dedicated robot station for a single evaluation pass.
Genesis World 1.0 can execute the same evaluation in under 0.5 hours, removing the need for human intervention or physical hardware, while ensuring bit-exact result consistency across multiple runs.
That represents an acceleration of approximately two orders of magnitude compared to real-world evaluation.
The team's strategic decision prioritizes evaluation before employing simulation for training data generation.
Their rationale is that if training and evaluation rely on the same simulated distribution, any observed performance improvement might merely reflect a better fit to the simulator's dynamics, rather than a genuinely superior model. So, what's the point of a model that's only good at pretending?
This evaluation approach is termed zero-shot real-to-sim: policies are evaluated in simulation but trained exclusively on real-world data, ensuring no simulated data contaminates the pretraining phase.
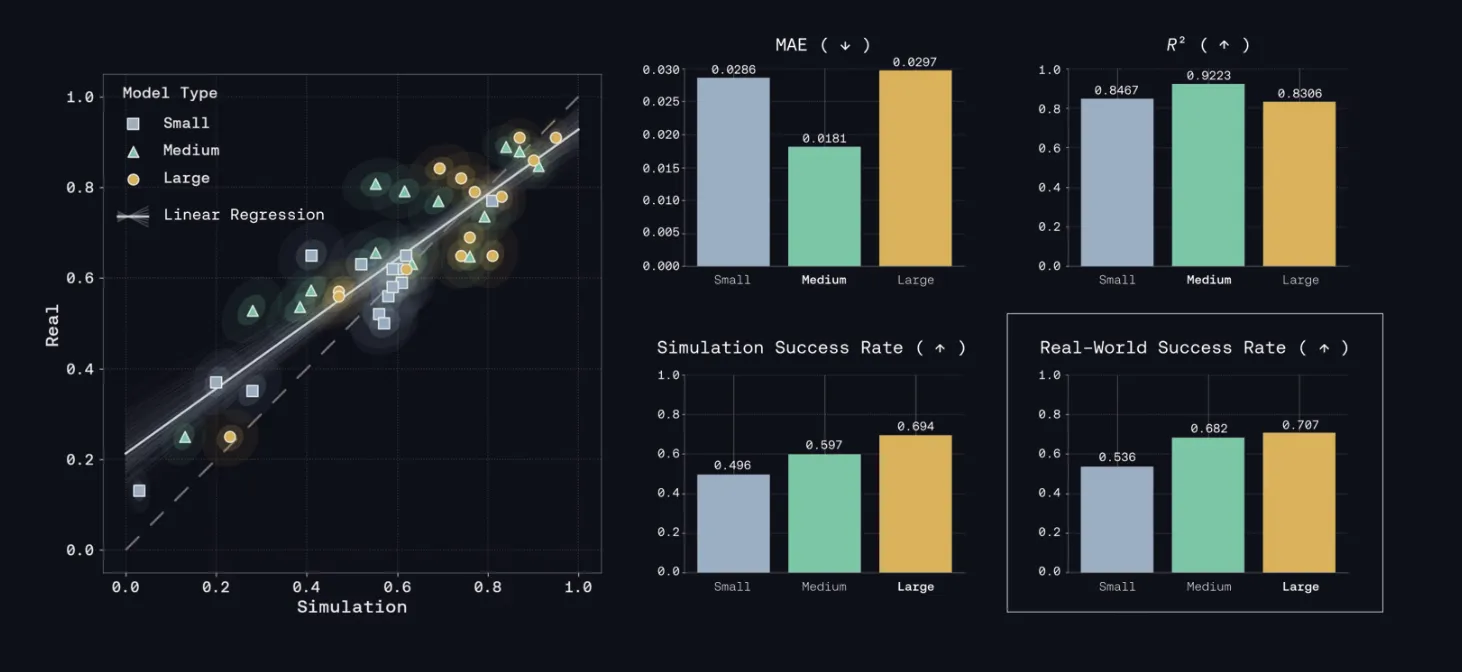
Impressive Sim-to-Real Correlation Results
The Genesis research team reports a strong Pearson correlation of 0.8996 (95% CI: [0.7439, 0.9314]) between simulation results and on-hardware rollouts.
This evaluation encompassed three model variants (Small, Medium, Large) across 14 distinct tasks, with 200 episodes per task. Confidence intervals were estimated using 1,000,000 bootstrap iterations.
The Mean Maximum Rank Violation (MMRV), a metric introduced in SimplerEnv, was measured at 0.0166 (95% CI: [0.0102, 0.0474]).
To pinpoint the sources of sim-to-real divergence, the Genesis team developed a real-time side-by-side rig.
This setup allows for parallel execution of the simulator and the physical robot, both starting from the same initial conditions.
Observations—including camera frames and proprioception data—can be sourced from either the simulator, the robot, or a blend of both.
By selectively swapping these sources, the team can isolate whether divergence stems from physics, rendering, communication, or control discrepancies.
As a result of this work, their reality gap, as measured by the FID score on their dataset, is 45% smaller than that of the next-best alternative simulator. Frankly, that's a pretty big deal.
Key Components of Genesis World 1.0
Nyx: Real-Time Path-Traced Rendering
Nyx is a GPU-accelerated path tracer integrated into Genesis World as a camera sensor and is available as the gs-nyx-plugin Python package.
It features prebuilt wheels for x86-64 Linux (manylinux 2.34+) and Windows 10/11, requiring an NVIDIA GPU with CUDA.
Nyx aims to deliver noise-free 1080p frames in 4 ms or less on a high-end consumer GPU, without baking or ghosting artifacts.
It achieves this through a visibility buffer, a bindless GPU-driven architecture, MSAA, hardware ray tracing, hardware matrix cores, and video compression.
Path tracing serves as the foundation, ensuring correct multi-bounce lighting, soft shadows, and indirect illumination.
A physically grounded camera model is layered on top, and an HDRI pipeline illuminates scenes using measured radiance.
Assets are derived from internal scanning and photogrammetry, with 3D Gaussian splats supplementing coverage where mesh reconstruction is insufficient.
Nyx is driven by batched physics, enabling thousands of parallel rollouts—each with its unique scenario, lighting, and camera trajectory—to be processed through a unified rendering pipeline.
Genesis World Physics: A Unified Multi-Physics Engine
The Genesis World physics platform is open source (Apache 2.0) and supports multi-physics simulations within a single pipeline.
This includes articulated rigid bodies (MJCF/URDF/USD), FEM for elastic deformables and cloth, MPM for granular and elasto-plastic materials, SPH for fluids, and PBD for fast cloth and position-based liquids.
Three interchangeable couplers are available behind the same scene API: a fast general-purpose coupler, a Drake-style Semi-Analytic Primal coupler with hydroelastic contact, and an Incremental Potential Contact (IPC) coupler for intersection-free contact in deformable scenes.
Switching between couplers requires only a single line of code change, without affecting assets, sensors, or the policy interface.
Genesis World 1.0 introduces two new solvers: the External Articulation Constraint (built on top of libuipc), which embeds joint-space dynamics directly into IPC’s optimization, and barrier-free elastodynamics, which replaces IPC’s logarithmic barrier with a custom augmented Lagrangian.
The augmented Lagrangian formulation avoids the ill-conditioning issues of standard IPC, enabling every contact pair returned by continuous collision detection to immediately enter the active set.
The research team reports performance improvements of up to 103× faster than traditional IPC in contact-heavy scenes, while maintaining intersection-free guarantees.
Additional improvements include new sensors (point-cloud tactile, temperature-grid, proximity), Implicit FEM with a Newton + CG solver, and expanded asset support (URDF xacro, MuJoCo general actuators, compound/mimic joints, equality/weld constraints).
Quadrants: Python-to-GPU Compiler
Quadrants is a cross-platform compiler for GPU-accelerated physics simulation, developed by Genesis AI and released under Apache 2.0.
Kernels are written in plain Python and JIT-compiled to NVIDIA CUDA, AMD ROCm, Apple Metal, Vulkan, and x86/ARM64 CPUs via LLVM. It was forked from Taichi in June 2025.
Key performance enhancements over upstream Taichi include runtime speed improvements of up to 4.6× on Genesis manipulation and locomotion benchmarks. Small detail, big impact: it means simulations run *much* faster.
Warm-cache startup time for single_franka_envs.py has been reduced from 7.2 seconds to 0.3 seconds—a more than 10× speedup.
Reverse-mode autodiff is now a first-class citizen on all backends, making differentiable simulation more portable.
Physics steps are recorded as single kernel graphs, eliminating per-step launch latency. Independent kernels run in parallel via streams.
Dense linear algebra (Cholesky factorization, triangular solves) compiles to 16×16 tile-blocked code paths. A perf-dispatch layer benchmarks kernel variants on first call and caches the fastest choice per signature.
Tensors share device memory with PyTorch via DLPack with zero-copy interop.
Installation: